Research
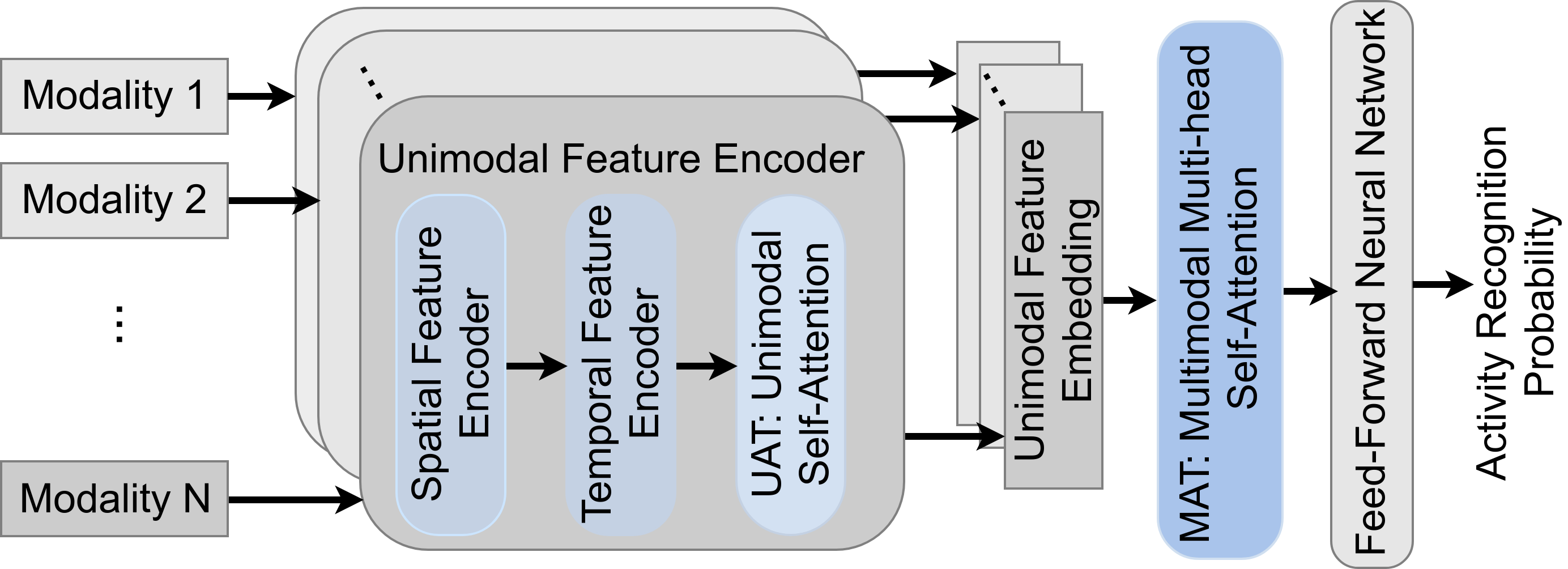
To fluently collaborate with people, robots need the ability to recognize human activities accurately. Although modern robots are equipped with various sensors, robust human activity recognition (HAR) still remains a challenging task for robots due to difficulties related to multimodal data fusion. To address these challenges, in this work, we introduce a deep neural network-based multimodal HAR algorithm, HAMLET. HAMLET incorporates a hierarchical architecture, where the lower layer encodes spatio-temporal features from unimodal data by adopting a multi-head self-attention mechanism. We develop a novel multimodal attention mechanism for disentangling and fusing the salient unimodal features to compute the multimodal features in the upper layer.
Team Members: Md Mofijul Islam, Tariq Iqbal